
Time-optimal gate-traversing planner for autonomous drone racing
We present a polynomial-based motion planner to produce time-optimal gate-traversing trajectories for quadrotors in the context of drone racing. It can handle almost all commonly seen racing gates, and produce near-minimum-time solution.
Jun 1, 2024
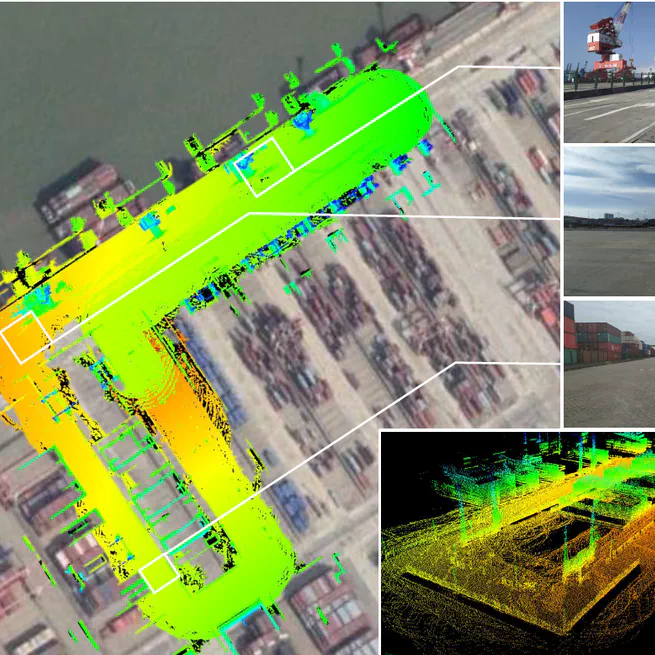
Lins: A lidar-inertial state estimator for robust and efficient navigation
Lins is a real-time LiDAR-inertial odometry for ground vehicles. It tightly couples the LiDAR and IMU with the iterated ESKF, and maintains robust performance in feature-sparse scenarios.
Jul 1, 2020