Lins: A lidar-inertial state estimator for robust and efficient navigation
Jul 1, 2020·
,
,
,
,
,
·
0 min read
Chao Qin
Haoyang Ye
Christian E. Pranata
Jun Han
Shuyang Zhang
Ming Liu
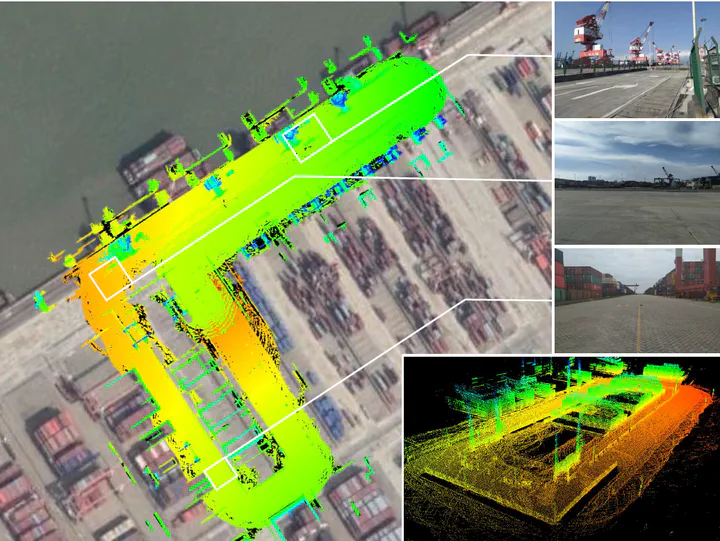 Image credit:
Image credit:
Abstract
We present LINS, a lightweight lidar-inertial state estimator, for real-time ego-motion estimation. The proposed method enables robust and efficient navigation for ground vehicles in challenging environments, such as feature-less scenes, via fusing a 6-axis IMU and a 3D lidar in a tightly-coupled scheme. An iterated error-state Kalman filter (ESKF) is designed to correct the estimated state recursively by generating new feature correspondences in each iteration, and to keep the system computationally tractable. Moreover, we use a robocentric formulation that represents the state in a moving local frame in order to prevent filter divergence in a long run. To validate robustness and generalizability, extensive experiments are performed in various scenarios. Experimental results indicate that LINS offers comparable performance with the state-of-the-art lidar-inertial odometry in terms of stability and accuracy and has order-of-magnitude improvement in speed.
Type
Publication
In 2020 IEEE International Conference on Robotics and Automation (ICRA2020)