About Me
Hi! I am a PhD student at the Flight System and Control Lab directed by Prof. Hugh H.-T. Liu. at the University of Toronto Institute of Aerospace Studies. I received my master degree in the Guidance, Navigation, and Control Lab from the Shanghai Jiao Tong University under the supervision of Prof. Xingqun Zhan.
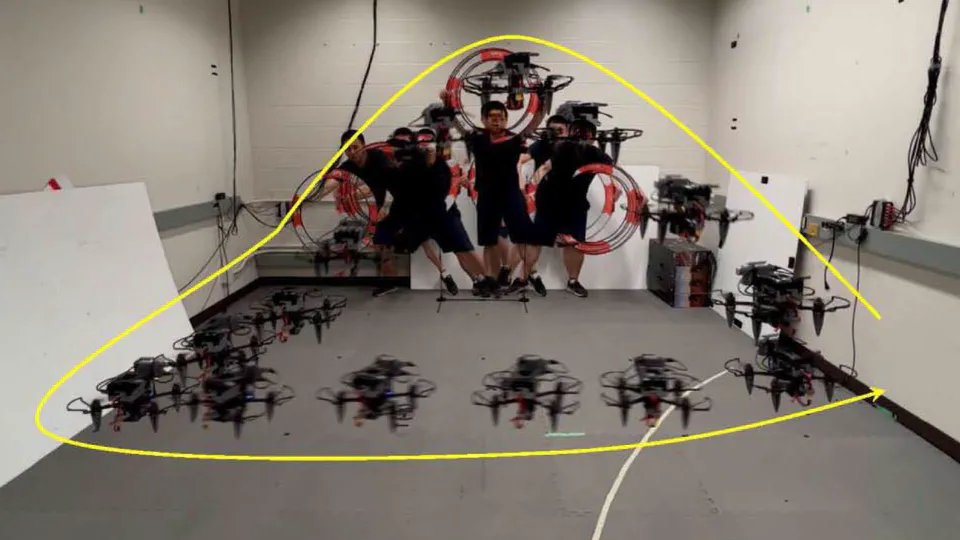
I am leading the autonomous drone racing team at the University of Toronto Aerospace Team (UTAT) with the mission of winning the official drone racing competition and cultivating future engineers/researchers in robotics.
- Robotics, AI
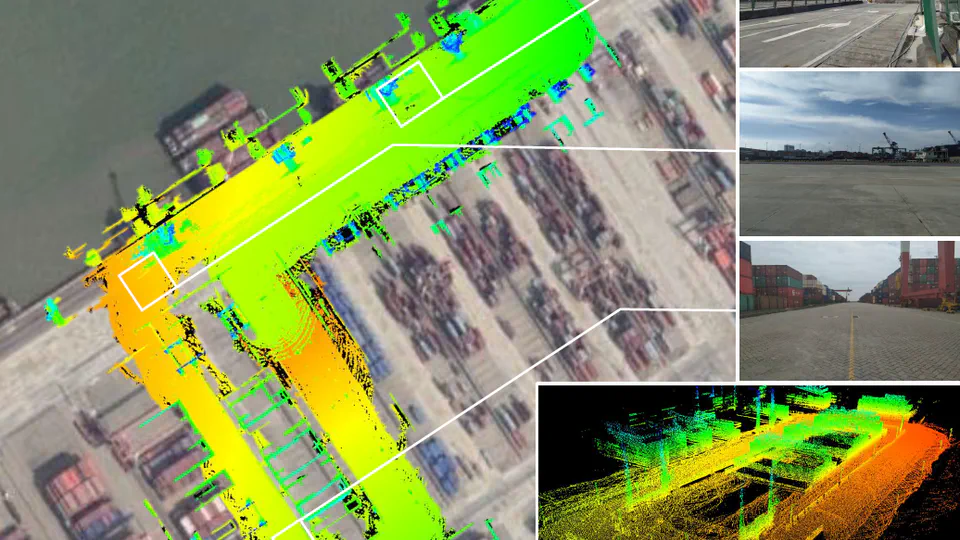
- Optimal control, motion planning, LiDAR SLAM,
- Autonomous drone racing, car racing
-
Ph.D. Candidate Aerospace Engineering
University of Toronto
-
M.Sc. Aerospace Engineering
Shanghai Jiao Tong University
-
BSc Electrical Engineering and Automation
Xidian University
My research interests lie in fully autonomous high-speed robots. This topic covers time-optimal planning and control, state estimation under aggressive maneuvers, and integration of machine learning into traditional methods.
My PhD thesis mainly focuses on quadrotors and time-optimal motion planners for drone racing. During my MSc, I concentrated on multi-sensor fusion (e.g., the GNSS, pinhole camera, and LiDAR) for fast and robust localization.